国家高新技术企业


|
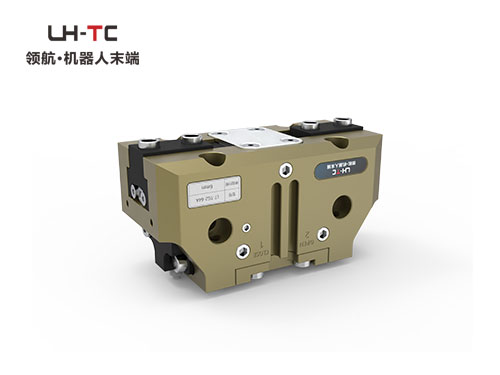
图片 |
订货号 |
型号 |
单指行程(mm) |
闭合力(N) |
张开力(N) |
最小保持力(N) |
建议工件重量(kg)① |
自重(kg) |
|
|
F11030001 |
LT-TG2-64A |
6 |
295 |
327 |
/ |
1.45 |
0.27 |
|
|
F11030002 |
LT-TG2-64A-CFM |
6 |
382 |
/ |
87 |
1.45 |
0.34 |
|
|
F11030003 |
LT-TG2-64A-OFM |
6 |
/ |
414 |
87 |
1.45 |
0.33 |
|
|
F11030004 |
LT-TG2-64B |
3 |
590 |
655 |
/ |
2.95 |
0.27 |
|
|
F11030005 |
LT-TG2-64B-CFM |
3 |
770 |
/ |
180 |
2.95 |
0.34 |
|
|
F11030006 |
LT-TG2-64B-OFM |
3 |
/ |
835 |
180 |
2.95 |
0.33 |
①摩擦系数0.1和安全系数2的前提下计算值,未考虑机器人的运动加速度。
警告:
1、上述闭合力张开力保持型夹爪,可作为单方向抓取力增强型的夹爪使用,不单独作为实现力保持功能的夹爪使用。
2、在抓取工件时若需要实现力保持功能,在依靠夹爪的力保持作用的同时,还需配置保压阀等设备。




 在线询价
在线询价 选型样本下载
选型样本下载

 传感器组件
传感器组件