国家高新技术企业



 发布时间
2022-02-14
发布时间
2022-02-14
 作者 领航
作者 领航
 阅读 1875次
阅读 1875次
为了使用机器人在生产线中高强度、高精度的作业。机器人快换接头不只具有高的硬度和负载能力,同时还具有显著的重复性。重要的是,机器人快换接头能够快速更换机器人末端执行器,并且易于容纳同一装配机器人或加工中心的多种不同零件,是机器人应用的理想选择。

机器人快换接头按照本体部分锁紧装置的不同大体可分为两种:一种是自动快换接头,另一种是手动快换接头。
机器人自动快换接头
在快换系统的支持下,机器人自动快换接头会更具需要自动更换末端执行器来完成相应的任务。将选好的工具与机器人快换接头的工具端口相连接,机器人手臂与主端口相连接。快换接头上的定位销、销孔、电路、气路以及锁紧装置均能够帮助其进行准确的定位。在机器人手臂移动到未定的位置和姿态的时候,锁紧装置就会立刻启动,进而实现锁紧。
机器人手动快换接头
机器人手臂末端执行器在该快换接头的作用下,能够在几秒内快速的完成相应的更换。机器人手动快换接头的空气端口和电气连接器能够向系统输出瞬间动力,无需手动重新连接空气管道,从而减少了机器人的停工时间。
与自动快换接头不同的是,在进行锁紧、释放的过程中手动快换接头需要人工的干预,才能完成末端执行器的更换。
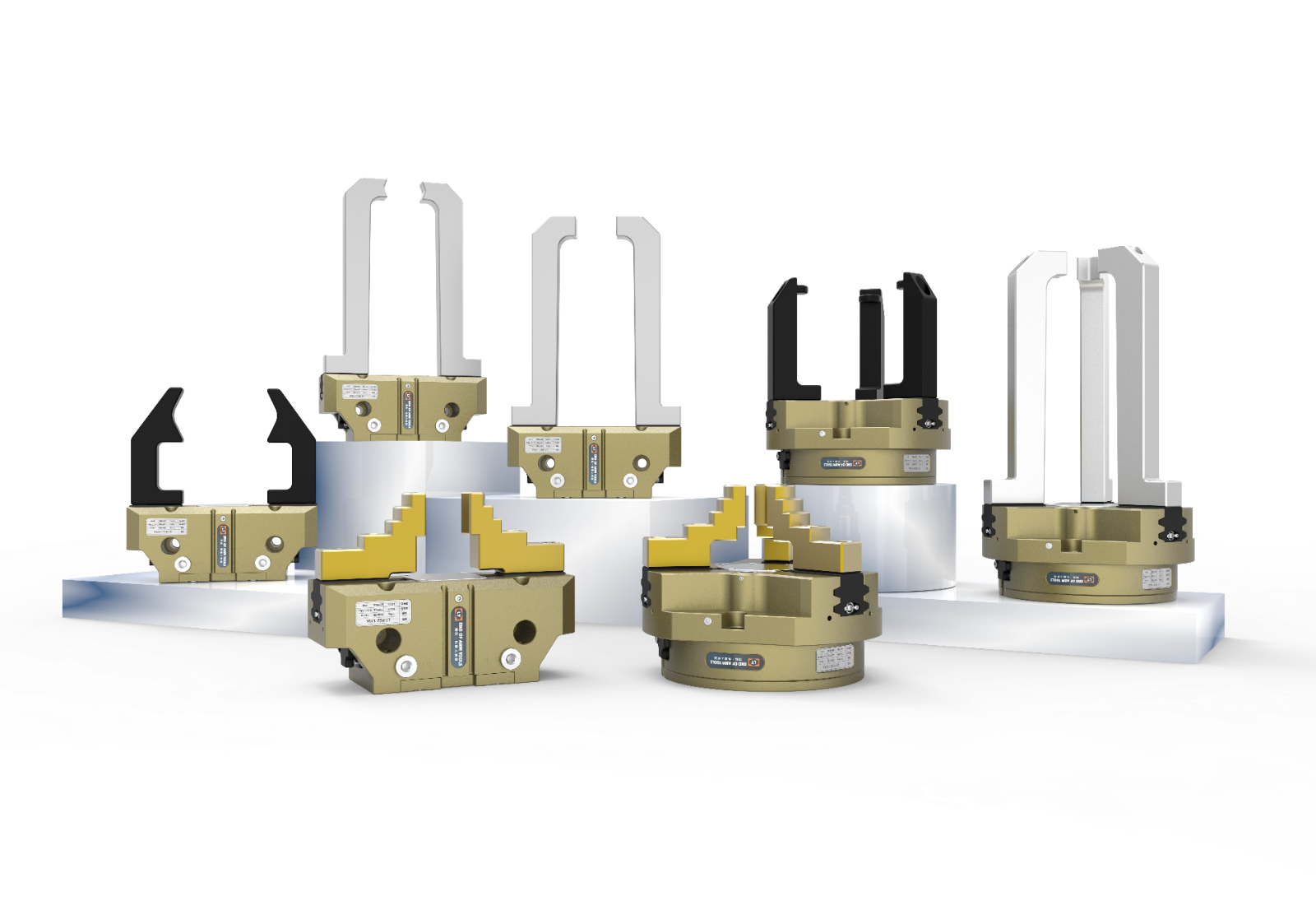
郑州领航机器人有限公司生产的机器人属于自动快换接头,它具有以下特性:
1)具有足够强的稳定性
当快换接头产生故障或者它的气压消失时,机器人快换接头的锁紧装置能够出色的完成防止主端口与工具端口分离的任务。
2)在保障承重的情况下,尺寸尽量小。
在确保不影响机器人功能发挥的前提下,机器人快换接头的尺寸尽可能小。
3)通过性良好
机器人快换接头具有供气流流通的气路连接口,供信号交流的信号线锁对应的端口以及允许电流流入的端口。
4)重复定位精度高
领航工具快换接头可以达到±0.02mm